1. 转动惯量的概念
转动惯量(Moment of Inertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母I或J表示。转动惯量的SI单位为kg·m²。对于一个质点,I=mr²,其中,m是其质量,r是质点和转轴的垂直距离。
转动惯量在旋转动力学中的角色相当于线性动力学中的质量,可形象地理解为一个物体对于旋转运动的惯性。
2.惯量是伺服电机的一个重要指标
惯量[inertia]是物质(物体)运动的惯性量值。其惯性大小的物理量,J= ∫ r^2 dm 其中r为转动半径,m为刚体质量惯量,也是伺服电机的一项重要指标。它指的是转子本身的惯量,对于电机的加减速来说相当重要。
转动惯量对伺服系统的精度、稳定性、动态响应都有不小影响,尤其是在负载加速和减速的过程中 。伺服系统应用中,折算到电机轴的负载惯量与电机的惯量之比不能过大,必须合理取值,否则,系统一般会出现振荡甚至控。

2.1 伺服电机的惯量
它指的是转子本身的惯量,对于电机的加减速来说相当重要。
电机的转子惯量是电机本身的一个参数。单从响应的角度来讲,电机的转子惯量应越小为好。但是,电机总是要接负载的,负载一般可分为二大类,一类为负载转矩,一类为负载惯量。
2.2 伺服电机惯量的意义
一般来说,小惯量的电机制动性能好,启动,加速停止的反应很快,适合于一些轻负载,高速定位的场合。如果你的负载比较大或是加速特性比较大,而选择了小惯量的电机,可能对电机轴损伤太大,选择应该根据负载的大小,加速度的大小等等因素来选择,一般有理论计算公式。
2.3 影响因素——负载惯量
影响伺服电机响应的主要是负载惯量。伺服电机驱动器对伺服电机的响应控制,最佳值为负载惯量与电机转子惯量之比为1:1,最大不可超过5倍。通过机械传动装置的设计,可以使负载惯量与电机转子惯量之比接近1或较小。当负载惯量确实比较大,机械设计不可能使负载惯量与电机转子惯量之比小于5倍时,则可使用电机转子惯量较大的电机,即所谓的大惯量电机。使用大惯量的电机,要达到一定的响应,驱动器的容量应要大一些。
3.惯量匹配的含义
对于一个特定的电动机,如果采用减速机构,使归算到电动机轴上的负载惯量与电动机的惯量相匹配(负载惯量等于电机惯量,即惯量比为1),在忽略减速器所增加的惯量和效率损失的情况下,系统就能实现最佳的功率传输,并能得到最大的负载加速度,这就是惯量匹配的涵义。
3.1伺服电机选型时,为什么要惯量匹配?
惯量匹配其实就是个综合衡量的问题,驱动电机和负载依靠紧固件连接,传递过程是个碰撞过程,惯量比过大类似于小球撞击大球,连接部位肯定要引起冲击振动;惯量比过小类似于大球撞击小球,连接部位也容易一起振动,而且大马拉小车能量浪费。比较理想的惯量比是1:1,两个相同大小的球完全弹性碰撞对连接部分冲击最小,能量传递最快,但是这样电机的成本过高,工程上通常惯量比3-10左右是比较理想的。
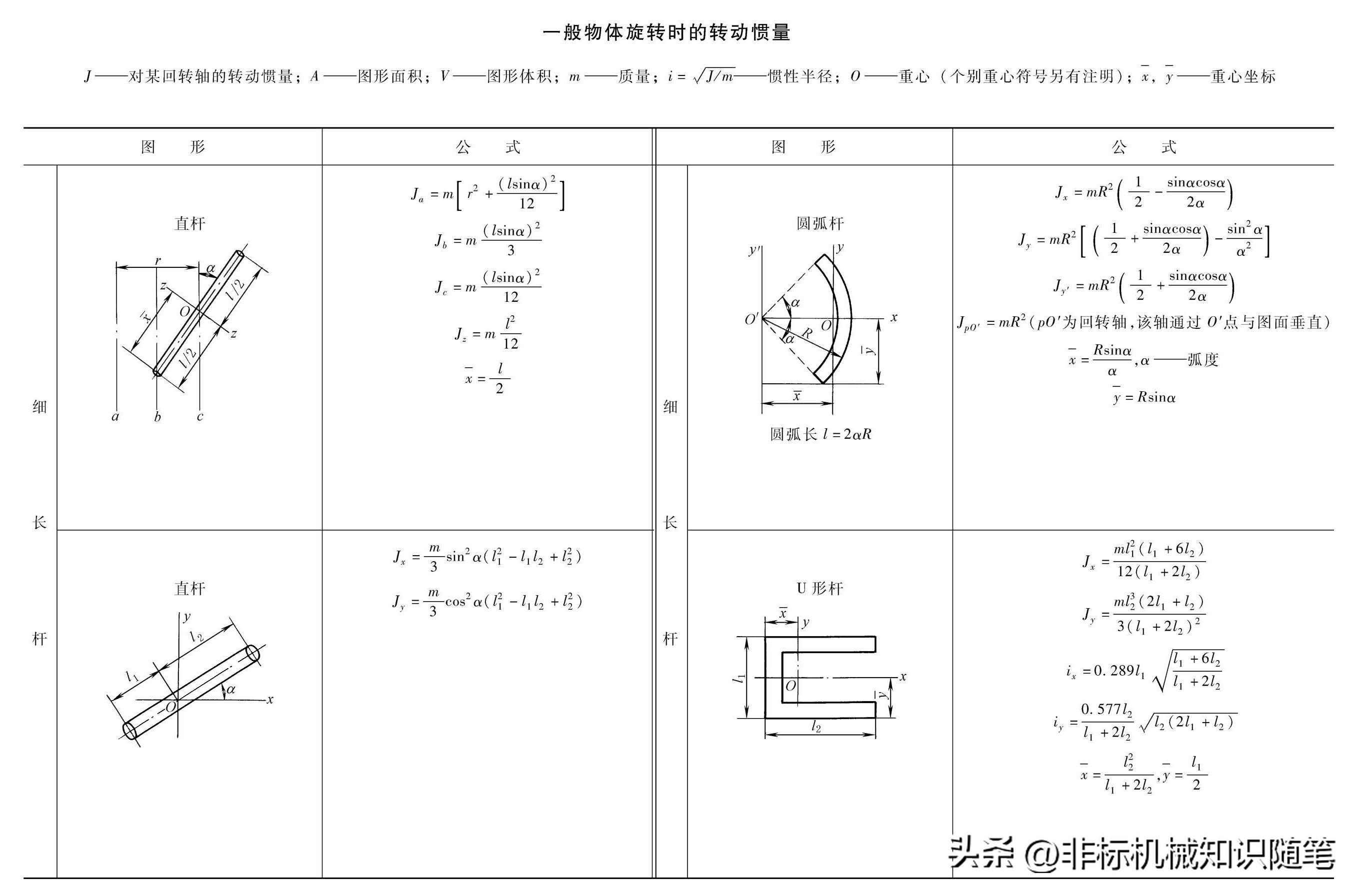
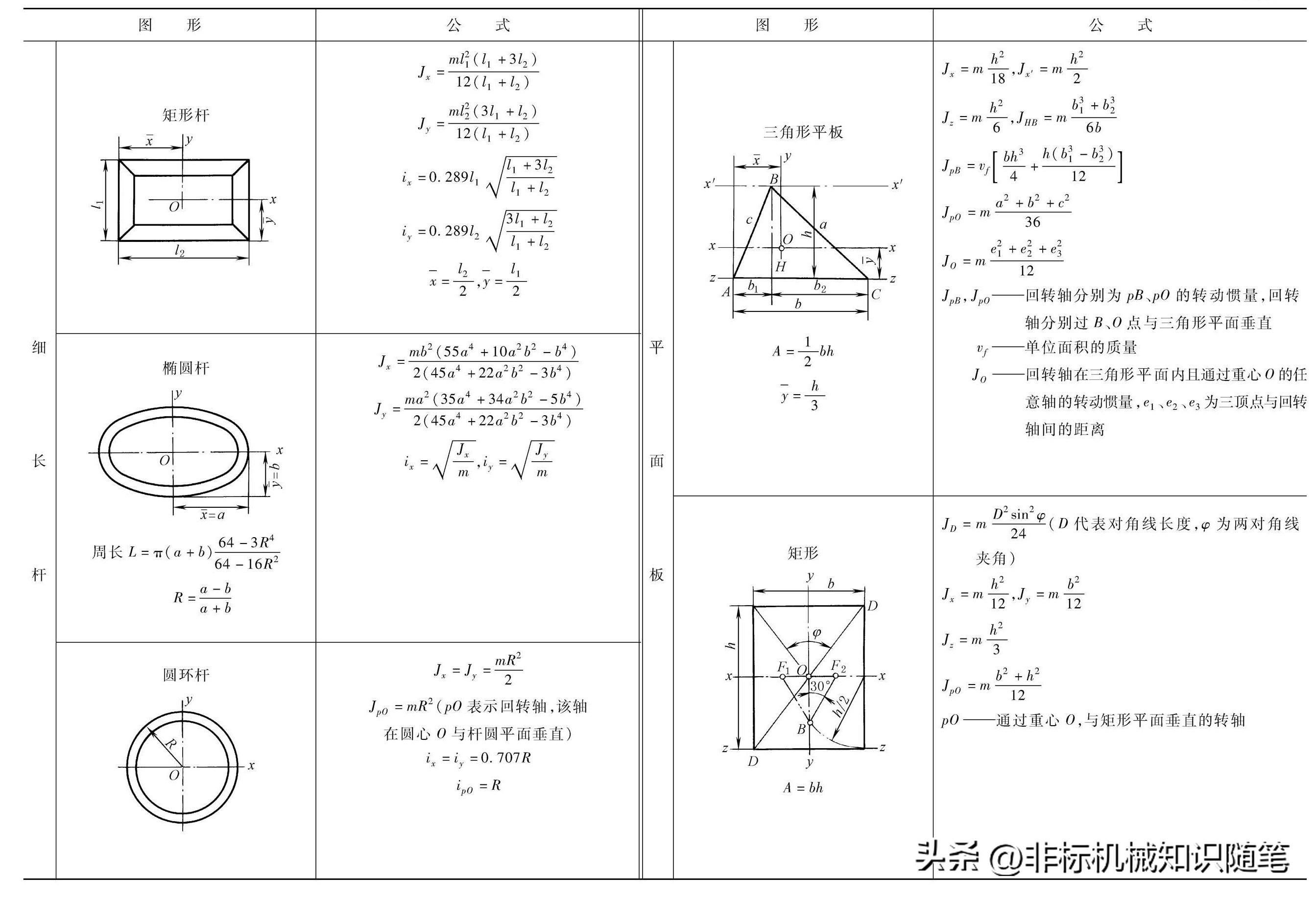
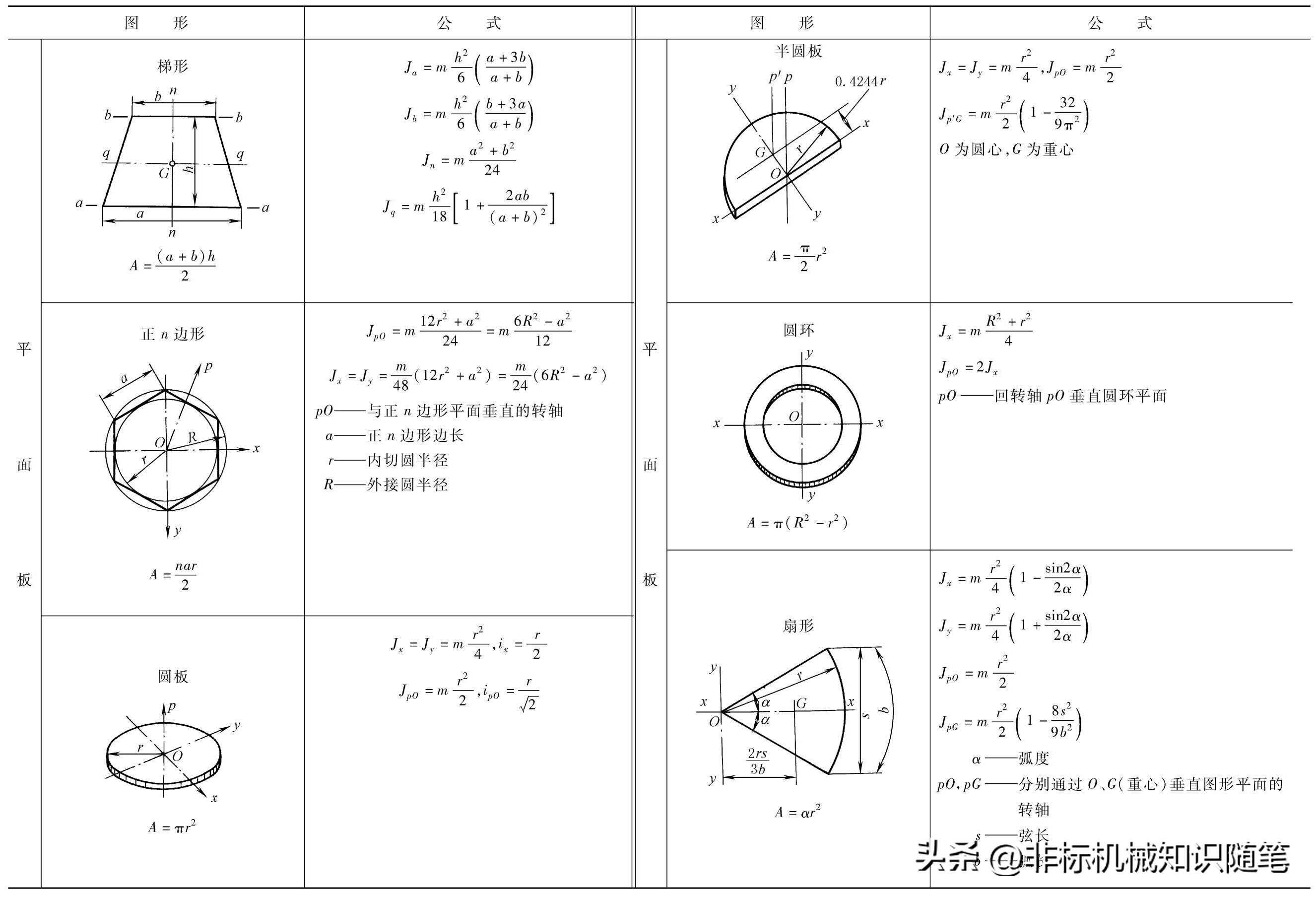
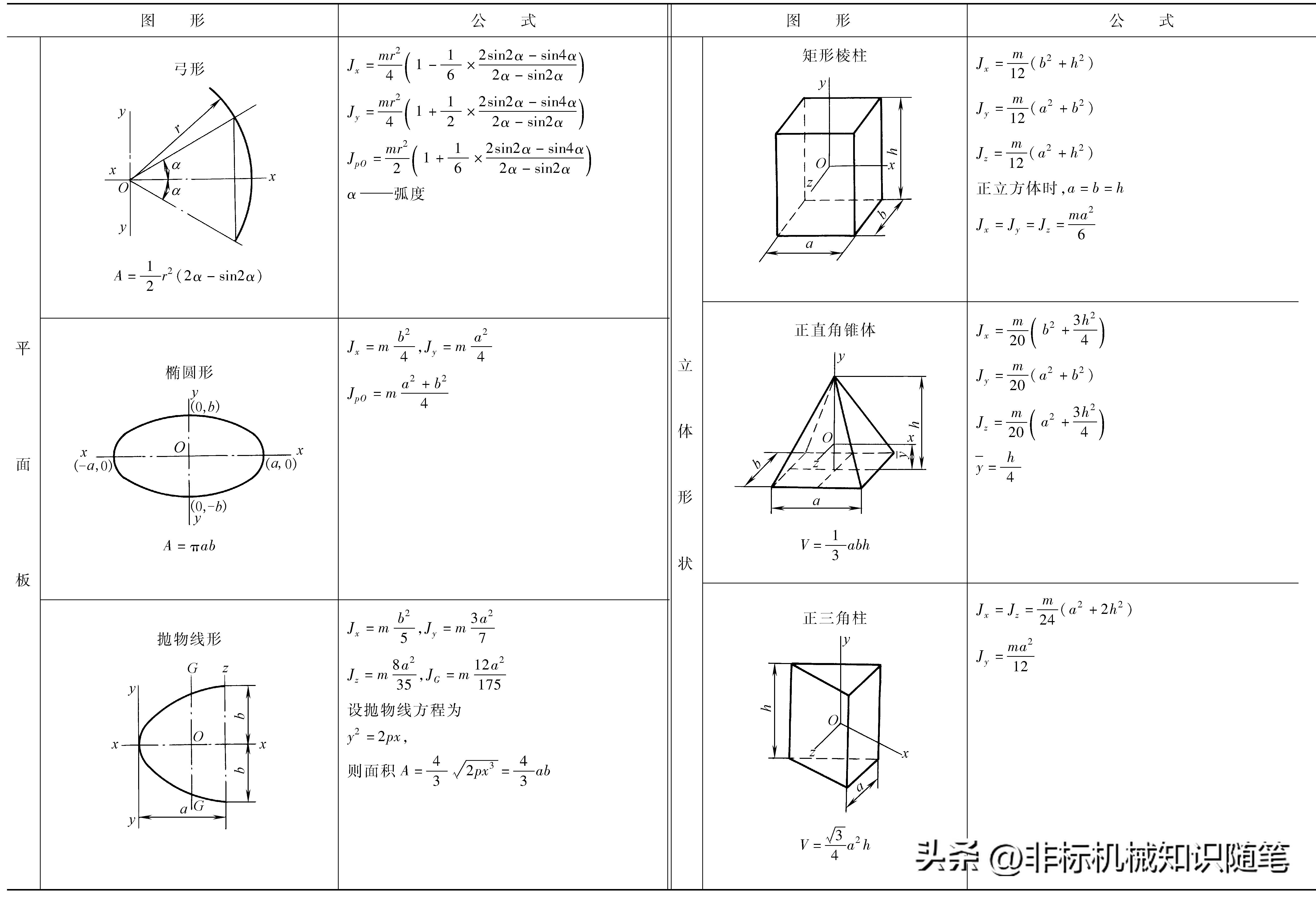
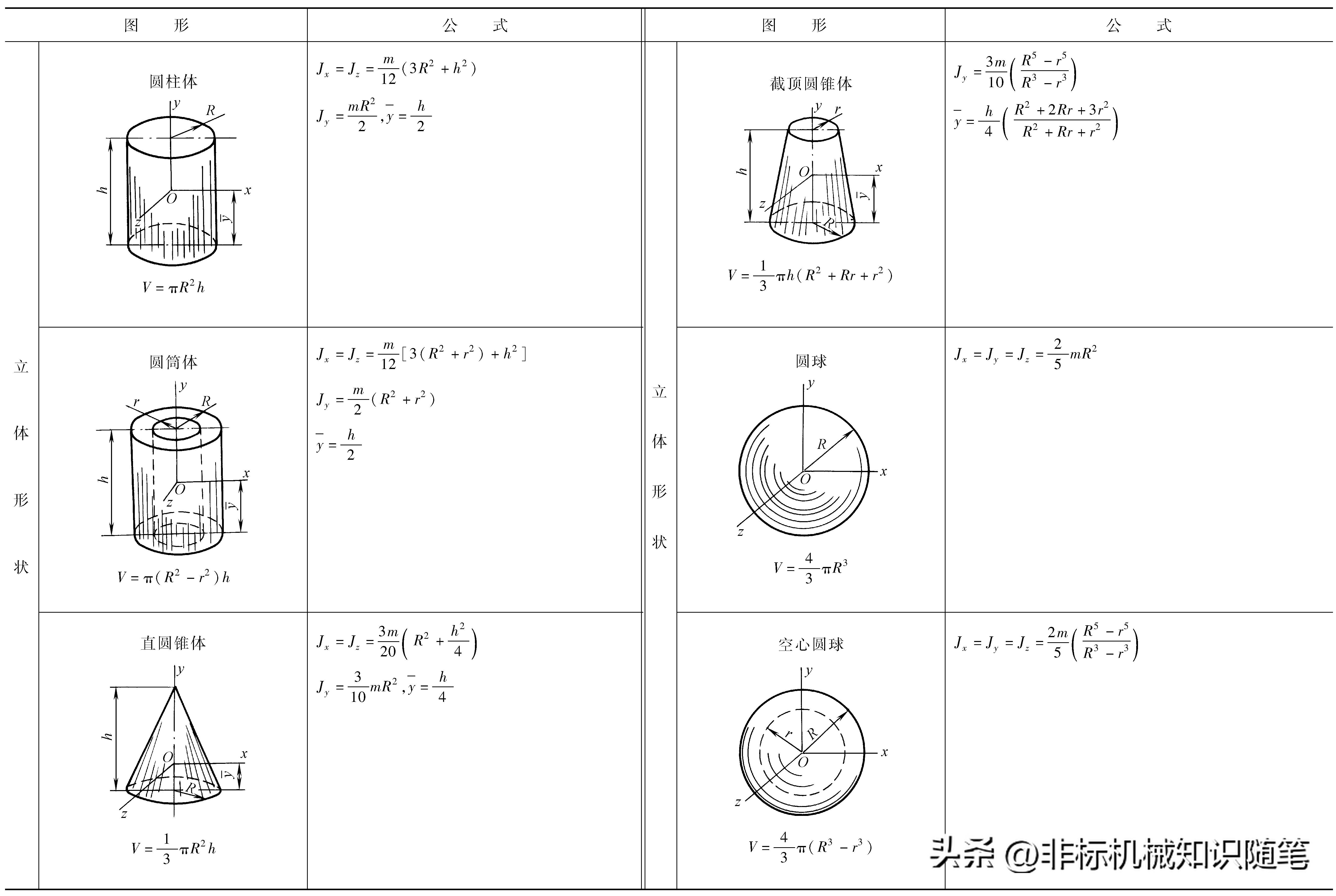
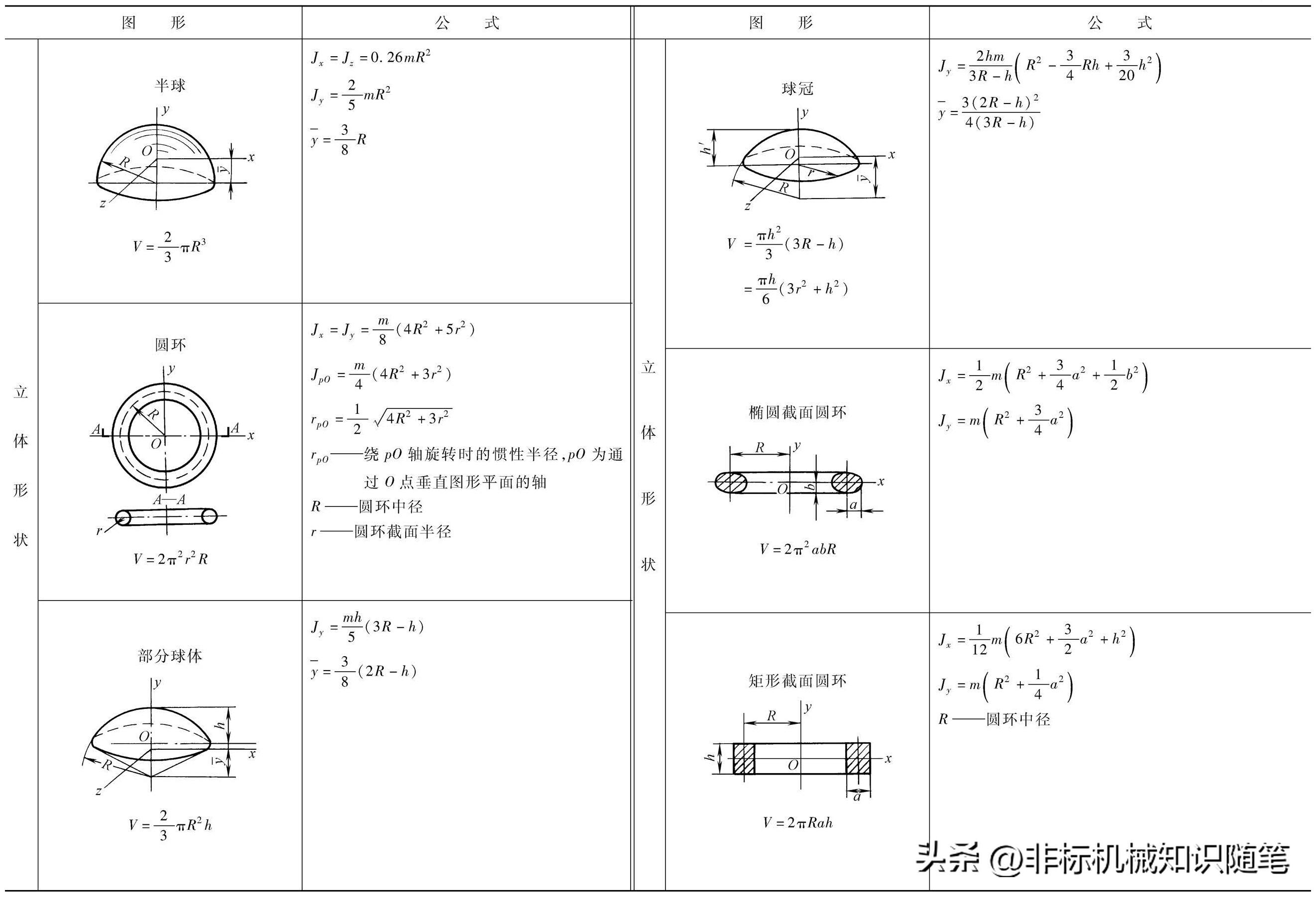
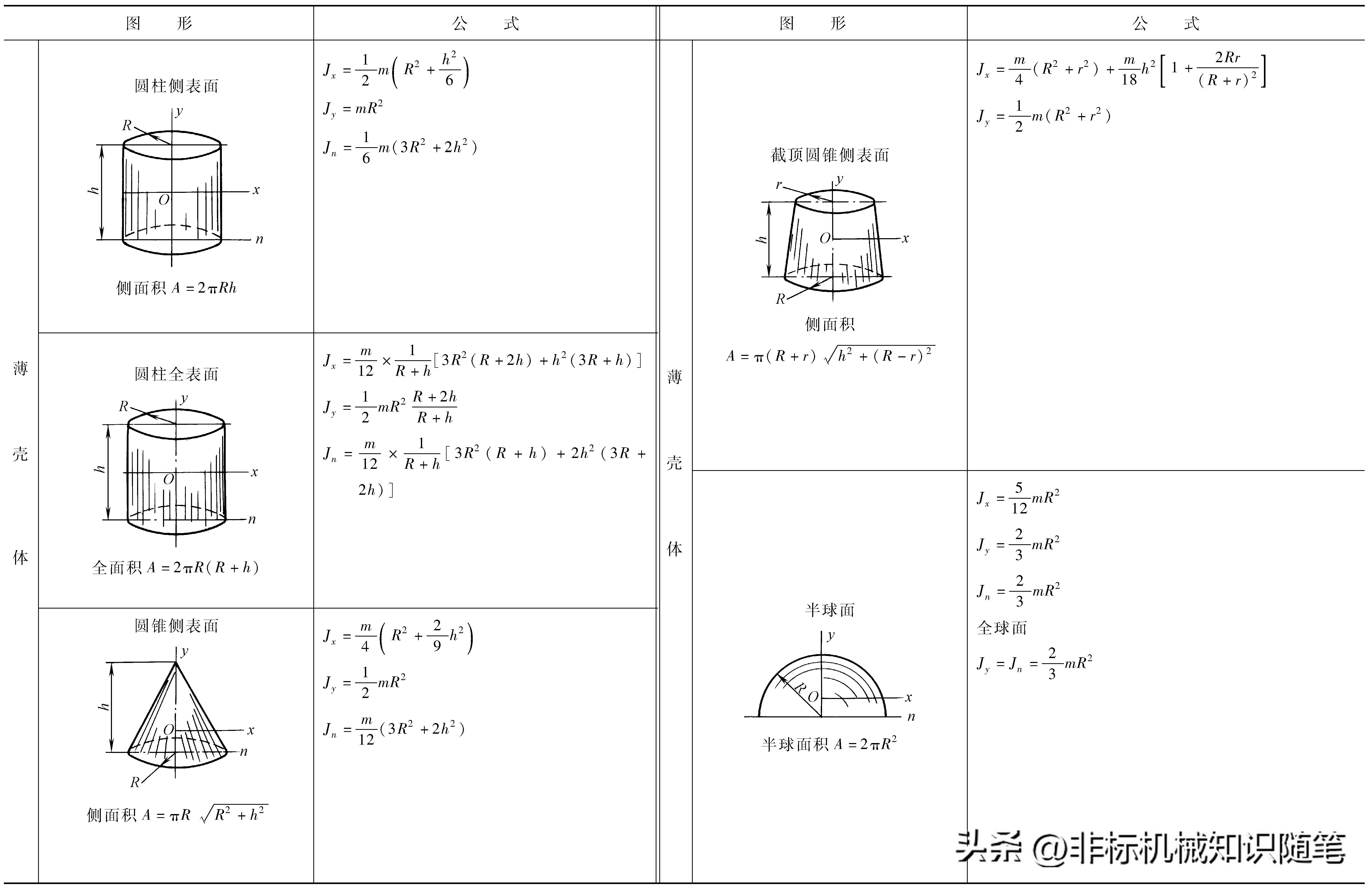
4.常见几何体的惯量计算